
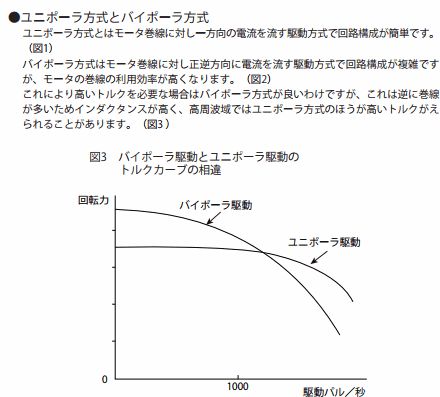
ステッピングモーター(バイポーラ)の使い方 TB6674PG版 [Arduino]
ステッピングモーターは任意の回転角度、回転時間でモーターを回転する事が出来ます。今回はTB6674PGを使用してモーターを操作します。
動作はDRV8835版と同じです。
使用部品・材料
総額で約,1520円です。(Arduino本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| サンハヤト SAD-101 ニューブレッドボード | ¥500 | Amazon.com |
| バイポーラ ステッピングモーター MDP-35A 48ステップ | ¥200 | 秋月電子の通販コード(P-09438) |
| ステッピングモータードライバー(バイポーラ) TB6674PG | ¥200 | 秋月電子の通販コード(I-07408) |
| 絶縁ラジアルリード型積層セラミックコンデンサー0.1μF50V2.54mm(10個入) | ¥100 | ノイズ除去用 秋月電子の通販コード(P-00090) |
| コネクタ付コード(みの虫×ジャンパーワイヤ) | ¥220 | 秋月電子の通販コード(C-08916) |
| 小型クリップ付コード 5色 | ¥180 | 秋月電子の通販コード(C-04351) |
| 9V電池(006P) | ¥100 | 100円ショップなど |
| バッテリースナップ(電池スナップ・Bスナップ) 縦型 ソフトタイプ | ¥20 | 9V電池用。 秋月電子の通販コード(P-004521) |
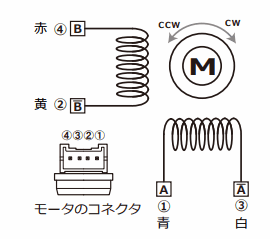
「みの虫」と「クリップ」はモーターの端子と接続します。クリップはジャンパワイヤーと組み合わせてください。
他のステッピングモーターを使用する場合はスケッチの先頭にある「1回転(360度)するステップ数」を変更すれば動作します。
配線図
Arduinoの9,11ピンはジャンパワイヤーが刺さっていませんが、Stepperクラスでダミーとして使用しています。他の用途では使用できません。
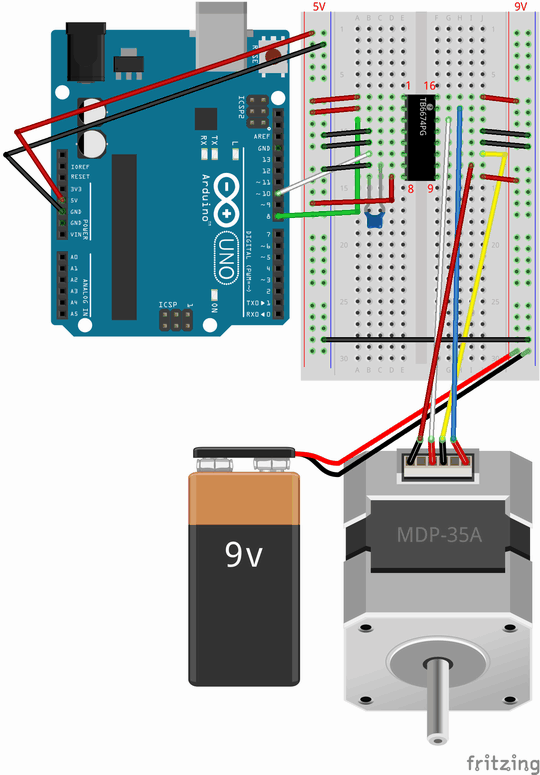
TB6674PGのピン配置は「U字」の左上が1でそこから反時計周りに「1,2,3...16」となります。
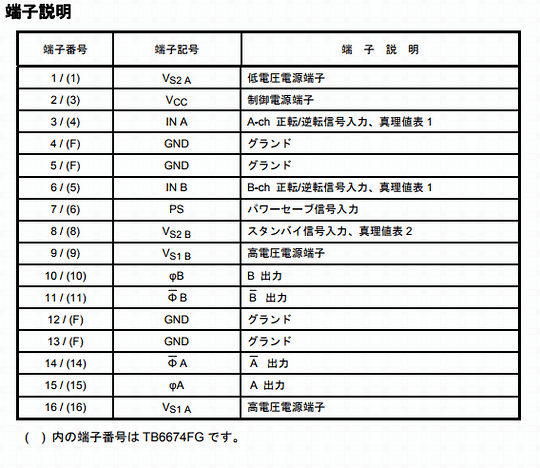
次は公式データシートより引用(TB6674_ja.pdf)
次はMDP-35Aの公式データシートより引用(MDP-35A_a.pdf)
駆動電圧
駆動電圧は12Vでコイル抵抗は40Ω(1相)です。
スケッチ(プログラム)
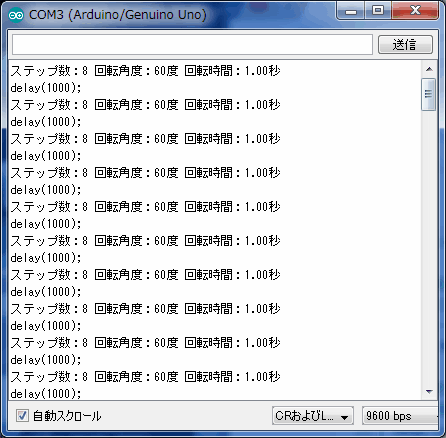
ステッピングモーターを1秒で60度回転させます。時間、角度は任意に設定可能です。また、設定内容はシリアルモニターへ表示されます。
#include <Stepper.h>
// 1回転(360度)するステップ数
// ※MDP-35Aの場合は常に48です。
// ※モーターが異なる場合は変更して下さい。
const float turnSteps = 48;
// [変更可能]毎分の回転数(rpm)
// ※回転時間の計算はloop()内のコードを参照
float rpm = 10;
// [変更可能]このステップ数分のモータを回転する(マイナスも設定可能)
// ※この例では「8 / 48 * 360」で60度回転します。
float Steps = 8;
Stepper myStepper(turnSteps, 8,9,10,11);
void setup() {
Serial.begin(9600);
myStepper.setSpeed(rpm) ;
}
void loop() {
Serial.print("ステップ数:");
Serial.print(Steps,0);
Serial.print(" 回転角度:");
Serial.print(Steps / turnSteps * 360,0);
Serial.print("度");
float times = (Steps / turnSteps) * (60 / rpm);
Serial.print(" 回転時間:");
Serial.print(abs(times));
Serial.println("秒");
myStepper.step(Steps);
Serial.println("delay(1000);" );
delay(1000);
}
実行例(シリアルモニター)
最後に
7,8ピンのセラミックコンデンサ(0.1μF)でモーターのノイズを97%ぐらいカットできています。(取り外すと不快音が増幅)
前回のDRV8835版ではモーターの異音は一切していないので、今回のモータードライバ(TB6674PG)が原因か使用方法を間違えているかも知れません。
このような状況ですのでDRV8835版がおススメです。
スポンサーリンク
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事
公開日:2017年07月26日

記事NO:02496
プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |








