
クレーンゲームを作る [Arduino]
Arduinoを使用して簡易的なクレーンゲームを作ってみました。
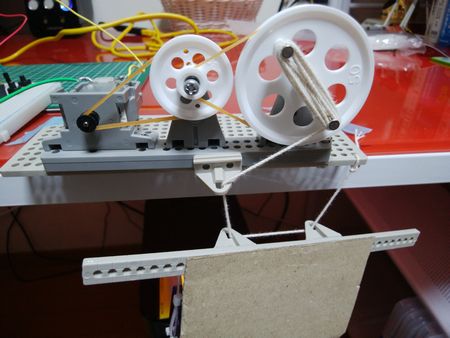
毎度、作りは粗いですが、仕組みはこんな感じで良いと思います。
今回のクレーンゲームは上下の移動のみですが、プーリー(滑車)の部分に車輪(タイヤ)をつけて上下左右に動けるようにするとゲームセンターにあるような本格的なゲームになります。
使用部品・材料
総額で約5,563円です。(Arduino本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| サンハヤト SAD-101 ニューブレッドボード (2個) | ¥1000 | Amazon.com |
| モータードライバ(TA7291P) | ¥150 | 秋月電子の通販コード(I-02001) |
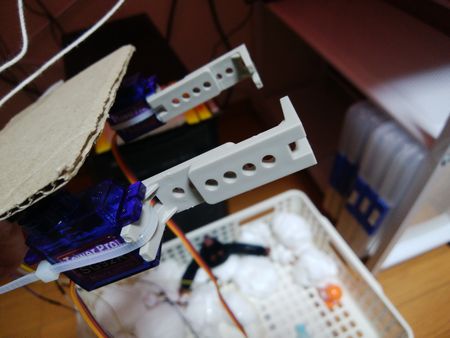
| マイクロサーボ SG92R (2個) | ¥1000 | トルク:2.5kgf/cm 秋月電子の通販コード(M-08914) |
| タミヤ 楽しい工作シリーズ No.121 プーリーユニットセット (70121) | ¥524 | このプーリー(滑車)はモーターを使用。 Amazon.com |
| タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット (70157) | ¥468 | Amazon.com |
| タミヤ 楽しい工作シリーズ No.143 ユニバーサルアームセット (70143) | ¥798 | Amazon.com |
| タクトスイッチ (5個) | ¥50 | 秋月電子の通販コード(P-03647) |
| ブレッドボード・ジャンパーワイヤ(オス-メス) 15cm(青) (10本入) (3個) | ¥660 | サーボのコード延長用に使用。(長いジャンパワイヤーを自作してもOK) 秋月電子の通販コード(C-08934) |
| 結束バンド 170本入り白色 10cm(4inch) | ¥100 | 小さくて細いもの。100円ショップ(ダイソー) |
| 3M スコッチ はがせる両面テープ 強力 薄手 12mm×15m SRE-12 | ¥483 | 強力ではがせる両面テープです。 Amazon.com |
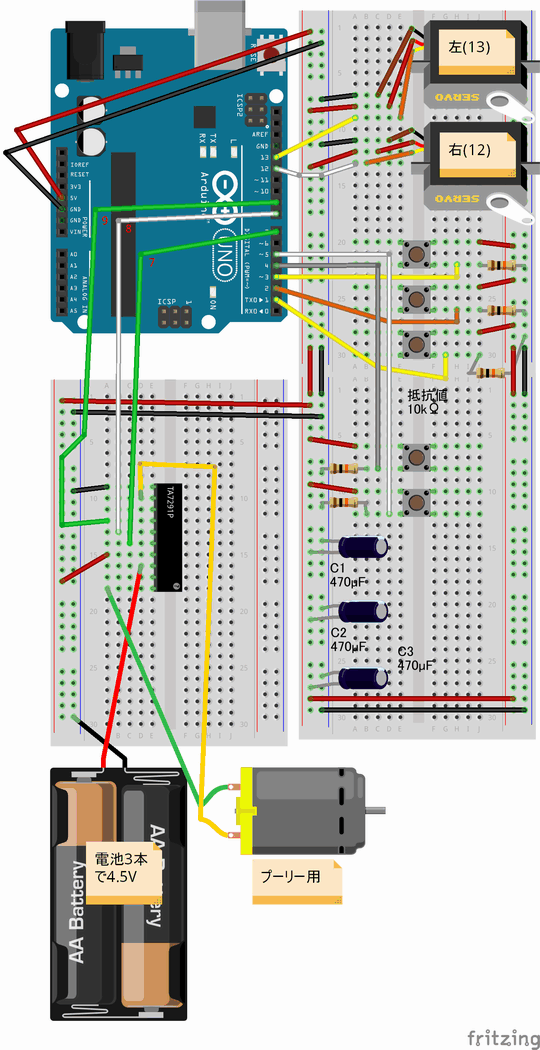
| 電解コンデンサー 470μF16V105℃(ルビコンWXA) (3個) | ¥30 | 電圧安定用。他のでも良い。 秋月電子の通販コード(P-08426) |
| カーボン抵抗器 | 数円 | 10kΩ(5個)を使用。 |
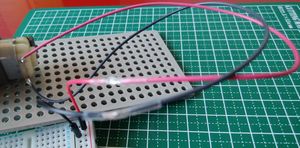
| 電池ボックス 単3×3本 リード線・フタ・スイッチ付 | ¥90 | モーター用。 秋月電子の通販コード(P-02666) |
| コネクタ付コード(みの虫×ジャンパーワイヤ) | ¥110 | 電池ボックス用。 秋月電子の通販コード(C-08916) |
| 単3電池 3本 | ¥100 | モーター用。 100円ショップ |
| マスキングテープ | 任意 | ユニバーサルプレートをこのテープで机などに取り付けます。マスキングテープなので後から綺麗に剥がせます。 ホームセンター |
| ダンボール | 無料 | 薄くて丈夫なダンボール。 私はAmazon.comで送られてくるダンボールの中にある中敷を使用しました。100円ショップの収納ボックス(紙)などでもOK。 |
※モータードライバの詳細は表内のリンク先をご覧ください。
モーターにはリード線がありませんので「耐熱電子ワイヤー」(P-06756)や片側をカットした「ジャンパーワイヤー」を半田付けして下さい。その2本を繋ぐ場合は2本のリード線をつなぐをご参考にして下さい。
写真



ダンボールのパーツサイズ
ダンボールの各パーツのサイズです。(目安)
| 部位 | サイズ(横x縦) |
|---|---|
| 胴(1枚) | 9.5cm x 6.5cm |
※「緻密な計算」で算出したサイズではありません。
サーボの初期設定
組み立てる前に各サーボの初期値をArduinoで設定しておきます。
| 部位 | 角度 |
|---|---|
| 右(12pin) | 90度 |
| 左(13pin) | 90度 |
次のように2つのサーボの初期角度を1つ1つ設定していきます。
#include <Servo.h>
Servo myServo;
void setup() {
// 右(12pin)のサーボの角度を90度にする
myServo.attach(12);
myServo.write(90);
}
この初期設定が終わってからサーボホーン(羽)を取り付けてください。
配線図
クレーンは5つのボタンで操作します。
各ボタンの動作
| ピン番号 | 動作 |
|---|---|
| 5 | ハンドを下げる |
| 4 | ハンドを持ち上げる |
| 3 | ハンドを広げる |
| 2 | ハンドでつかむ |
| 1 | ハンドの初期化 |
スケッチ(プログラム)
サーボの角度は各人の環境で調整して下さい。
#include <Servo.h>
Servo myServoL;
Servo myServoR;
void setup() {
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
myServoR.attach(12);
myServoL.attach(13);
// サーボの位置を初期化する
myServoL.write(90);
myServoR.write(90);
delay(2000);
}
void loop() {
// ハンドを下げる
if (digitalRead(5) == HIGH) {
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
delay(100);
}
// ハンドを持ち上げる
if (digitalRead(4) == HIGH) {
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
delay(500);
}
digitalWrite(7, LOW);
digitalWrite(8, LOW);
// ハンドを広げる
if (digitalRead(3) == HIGH) {
myServoR.write(110);
delay(500);
myServoL.write(65);
delay(500);
}
// ハンドでつかむ
if (digitalRead(2) == HIGH) {
myServoL.write(95);
delay(500);
myServoR.write(80);
delay(500);
}
// ハンドの初期化
if (digitalRead(1) == HIGH) {
myServoL.write(90);
delay(500);
myServoR.write(90);
delay(500);
}
}
スポンサーリンク
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事
公開日:2017年12月21日

記事NO:02623
プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |






