
2足の足踏みロボット [Arduino]
2本足のロボットにサーボモーターを使用して「足踏み」をする実験です。
二足歩行ロボットは二足歩行ロボット 入門編をご覧下さい。
使用部品・材料
総額で約2,580円です。(Arduino本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| サンハヤト SAD-101 ニューブレッドボード | ¥500 | Amazon.com |
| マイクロサーボ SG92R (2個) | ¥1000 | 秋月電子の通販コード(M-08914) |
| 両端ロングピンヘッダ 1×40 | ¥50 | ニッパーで3つにしてサーボの端子と接続。 秋月電子の通販コード(C-09056) |
| 結束バンド 170本入り白色 10cm(4inch) | ¥100 | ユニバーサルプレートなどの穴に通すので小さくて細いもの。100円ショップ(ダイソー) |
| タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット (70157) (2個) | ¥910 | Amazon.com |
| 電解コンデンサー 470μF16V105℃(ルビコンWXA) (2個) | ¥20 | 電圧安定用。他のでも良い。 秋月電子の通販コード(P-08426) |
| 割り箸 | ¥0 | サーボモーターの羽とロボットの足を固定する為に使用する。 |
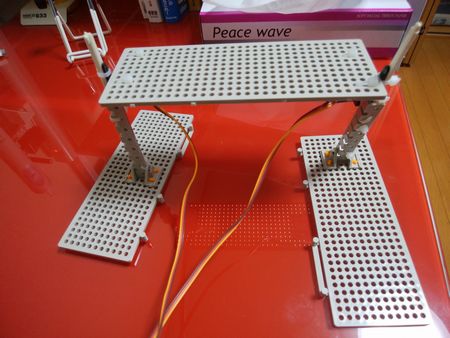
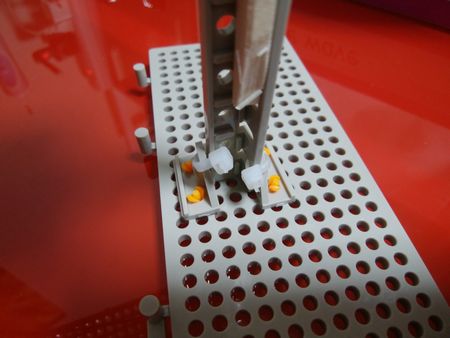
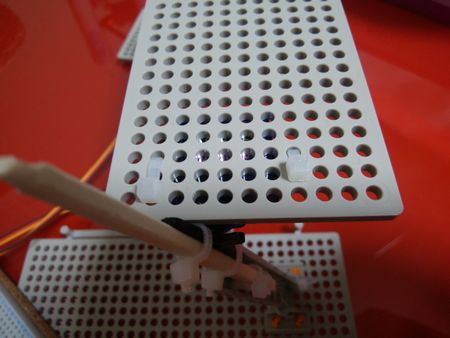
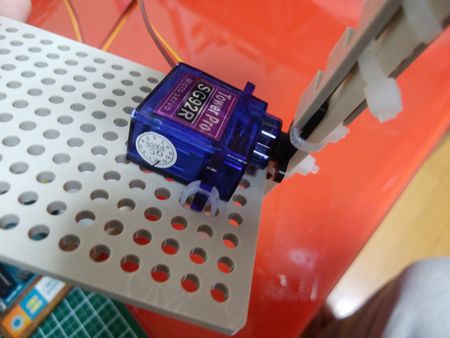
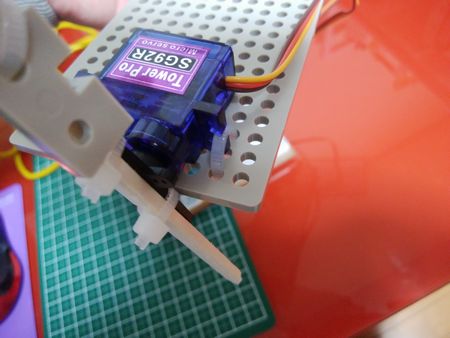
写真
サーボモーターとロボットの足、足首はきつく固定します。
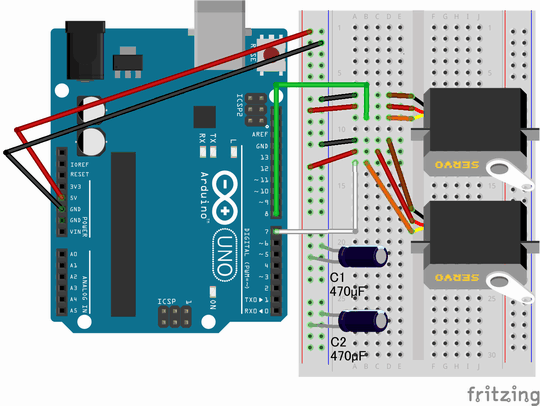
配線図
スケッチ(プログラム)
コード内のサーボ角度は各自の環境に調整して下さい。
#include <Servo.h>
Servo myServoR;
Servo myServoL;
void setup() {
myServoR.attach(8);
myServoL.attach(7);
// 初期化
myServoR.write(90);
myServoL.write(90);
delay(1000);
}
void loop() {
// これらの角度は各自の環境用に調整します。
myServoR.write(115);
delay(1000);
myServoL.write(90);
delay(1000);
myServoR.write(90);
delay(1000);
myServoL.write(45);
delay(1000);
myServoR.write(90);
delay(1000);
myServoL.write(90);
delay(1000);
}
スポンサーリンク
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事
公開日:2017年12月06日 最終更新日:2017年12月19日

記事NO:02618
プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |








