
ステッピングモーター(ユニポーラ)の使い方 SN754410NE版 [Arduino]
ステッピングモーターは任意の回転角度、回転時間でモーターを回転する事が出来ます。今回はSN754410NEを使用してモーターを操作します。
次の実行例は「1秒に60度回転」するので6秒で1回転します。
使用部品・材料
総額で約1,570円です。(Arduino本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| サンハヤト SAD-101 ニューブレッドボード | ¥500 | Amazon.com |
| ステッピングモーター SPG27-1101 | ¥350 | 秋月電子の通販コード(P-11839) |
| ハーフブリッジドライバ(4回路入)SN754410NE | ¥200 | 秋月電子の通販コード(I-05277) |
| コネクタ付コード(みの虫×ジャンパーワイヤ) | ¥220 | 秋月電子の通販コード(C-08916) |
| 小型クリップ付コード 5色 | ¥180 | 秋月電子の通販コード(C-04351) |
| 9V電池(006P) | ¥100 | 100円ショップなど |
| バッテリースナップ(電池スナップ・Bスナップ) 縦型 ソフトタイプ | ¥20 | 9V電池用。 秋月電子の通販コード(P-004521) |
「みの虫」と「クリップ」はモーターの端子と接続します。クリップはジャンパワイヤーと組み合わせてください。
他のステッピングモーターを使用する場合はスケッチの先頭にある「1回転(360度)するステップ数」を変更すれば動作します。
配線図
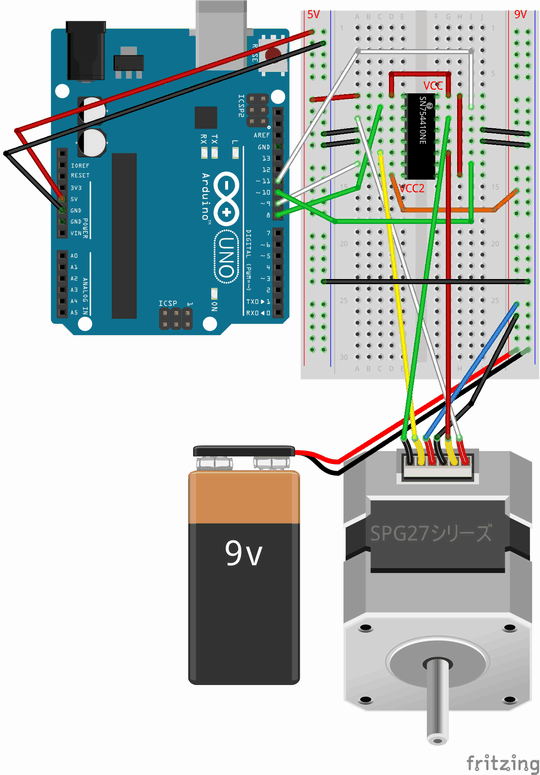
SN754410NEの公式データシートより引用(SN754410NE.pdf)
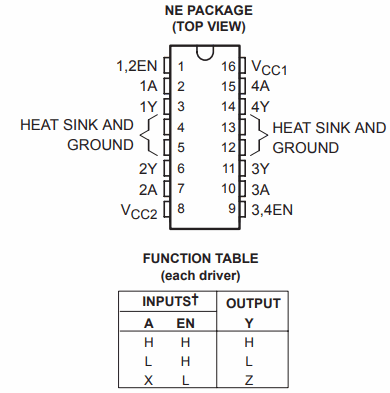
※AはInput(Arduinoのデジタルピン)、YはOutput(モーターの端子)
次はSPG27の公式データシートより引用(SPG27-1601.pdf)
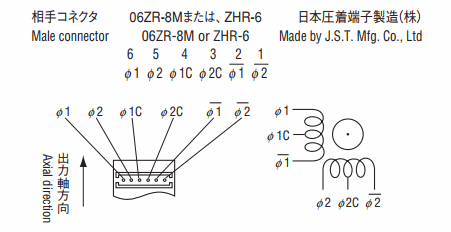
SPG27は3つのグループに分かれます。
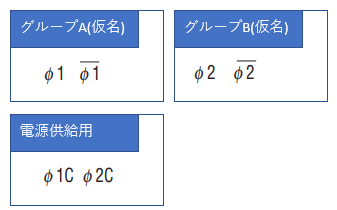
SN754410NEは2つです。(モーター側)
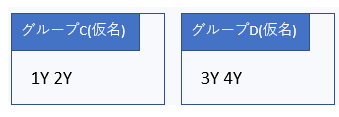
配線する際はグループAはグループC、グループDのどちらかに配線します。同じようにグループBはグループC、グループDのどちらかとなります。
φ1とφ2をグループCに配線するなどのような配線方法はできませんのでご注意ください。
入力定格
SPG27-1101の平均消費電力は5W以内でコイル抵抗は30Ωです。
今回の9V電池だと馬力がないので9Vや12VのACアダプターを使用する方法もあります。
スケッチ(プログラム)
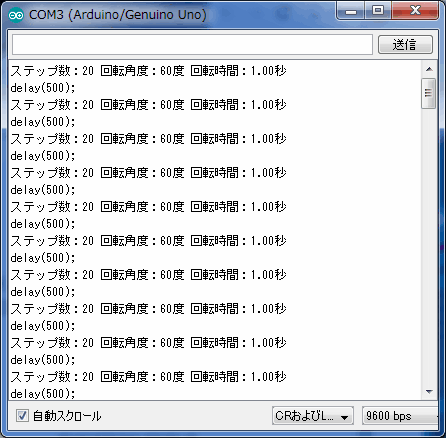
ステッピングモーターを1秒で60度回転させます。時間、角度は任意に設定可能です。また、設定内容はシリアルモニターへ表示されます。
#include <Stepper.h>
// 1回転(360度)するステップ数
// ※SPG27-1101の場合は常に120です。
// ※モーターが異なる場合は変更して下さい。
const float turnSteps = 120;
// [変更可能]毎分の回転数(rpm)
// ※回転時間の計算はloop()内のコードを参照
float rpm = 10;
// [変更可能]このステップ数分のモータを回転する(マイナスも設定可能)
// ※この例では「20 / 120 * 360」で60度回転します。
float Steps = 20;
Stepper myStepper(turnSteps, 8,9,10,11);
void setup() {
Serial.begin(9600);
myStepper.setSpeed(rpm) ;
}
void loop() {
Serial.print("ステップ数:");
Serial.print(Steps,0);
Serial.print(" 回転角度:");
Serial.print(Steps / turnSteps * 360,0);
Serial.print("度");
Serial.print(" 回転時間:");
float times = (Steps / turnSteps) * (60 / rpm);
Serial.print(abs(times));
Serial.println("秒");
myStepper.step(Steps);
Serial.println("delay(500);" );
delay(500);
}
実行例(シリアルモニター)
スポンサーリンク
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事
公開日:2017年07月24日 最終更新日:2017年07月26日

記事NO:02492
プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |








