
EEPROM(Microwire版)の使い方 [Arduino]
EEPROMは電源をオフにしてもデータが消えない半導体メモリです。

Arduino UNOでは標準で1024byteのEEPROMがありますが、今回は外部のEEPROM(Microwire接続)を使用します。
Microwire(マイクロワイヤ)
Microwire接続はArduinoのSPIで接続可能です。
但し、通常のSPI接続だとSS(Slave Select pin)をLOWにしている間にデバイス間の処理を行い。処理が完了したらHIGHに戻します。本来はこの一連の作業ですが、MicrowireはLOWとHIGHが逆になっています。
その他に今回の「AT93C46A」は相性が悪い為かビット操作が必要です。
使用部品・材料
総額で約300円です。(Arduino本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| ブレッドボード | ¥270 | 秋月電子の通販コード(P-00315) |
| 3線式シリアルEEPROM AT93C46 ATMEL製 AT93C46(A)-10PI-2.7 | ¥30 | 秋月電子の通販コード(I-00694) |
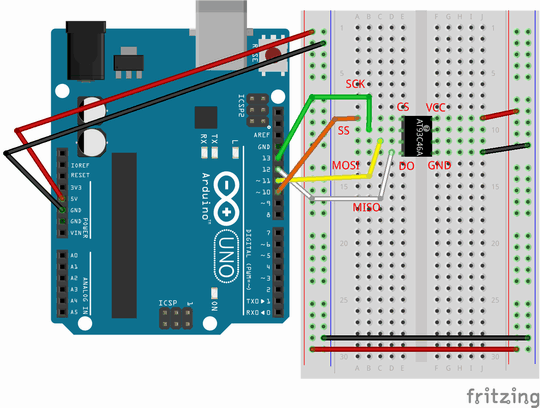
配線図
通常のSPI接続のように4本を配線します。
次は秋月にある公式データシートより引用(AT93C46A.pdf)
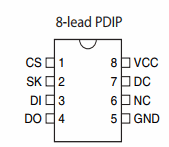
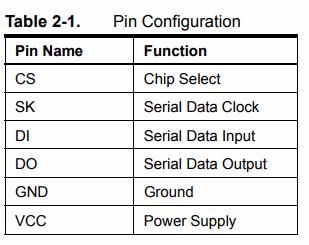
6:NCはNot Connectionで未接続です。7:DCは説明が一切ありません。マルツのデータシートによると7:DUで「Don't Use」(使うな!)と強めに書いてあります。(恐らく、DC = Don't Conectかも!?)
AtmelのAT93C46A、AT93C46D、AT93C86、AT93C56は同じシリーズですので大体一緒です。また、秋月にあるデータシートと併せてマルツにあるデータシートの方も確認するとわかりやすいです。
モードとアドレスについて
今回の「AT93C46A」はデータシート(秋月)に記載されているモードは「16bitモード」のみです。このモードは2byte毎にデータを書き込み、読み込むモードとなります。アドレスは0番地から63番地までで最大128byte(64×2)の領域があります。
※今回ご紹介するスケッチは16bitモードとなります。
スケッチ(プログラム)
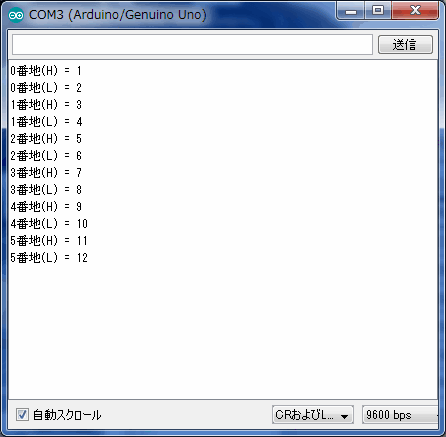
アドレス0番地から5番地までに「数値」を書き込みます。次にその番地から値を取得してシリアルモニターへ表示します。(2byte毎)
#include <SPI.h>
// SCK : pin 13 (Serial ClocK)
// MISO : pin 12 (Master In Slave Out)
// MOSI : pin 11 (Master Out Slave In)
// SS : pin 10 (Slave Select pin)
void setup() {
Serial.begin(9600);
// SPIの初期化
// ※自動的に「SCK、MOSI、SSのピンの動作はOUTPUT」となり「SSはHIGH」となる
SPI.begin();
// SPI転送モード
// クロック位相(CPOL) = 0 クロック極性(CPHA) = 0
SPI.setDataMode(SPI_MODE0);
// SPI送受信用のビットオーダー(MSBFIRST)
SPI.setBitOrder(MSBFIRST);
// SPIクロック分周器 2MHz = 16MHz/8
SPI.setClockDivider(SPI_CLOCK_DIV8);
// 書き込みモードの設定
// ※Instruction Set(命令セット)は2byteで「ビットは右寄せ」です。
digitalWrite(SS, HIGH);
// EWEN命令(書き込みの有効)
SPI.transfer(0b00000001);
SPI.transfer(0b00110000);
// EWDS命令(書き込みの無効→読み込み専用)
//SPI.transfer(0b00000001);
//SPI.transfer(0b00000000);
digitalWrite(SS, LOW);
delay(10);
// アドレス0番地から5番地までデータを書き込む
uint8_t count =1;
for (int i=0; i< 6; i++){
digitalWrite(SS, HIGH);
// WRITE命令 + アドレス
SPI.transfer(0b00000001);
SPI.transfer(0b01000000 | i);
// 2byte書き込む
SPI.transfer(count++);
SPI.transfer(count++);
digitalWrite(SS, LOW);
delay(10);
}
// アドレス0番地から5番地までデータを読み込む
for (int i=0; i< 6; i++){
digitalWrite(SS, HIGH);
// READ命令 + アドレス
SPI.transfer(0b00000001);
SPI.transfer(0b10000000 | i);
delay(5);
// ビットがずれているので3byteを取得する
uint8_t b1 = SPI.transfer(0x00);
uint8_t b2 = SPI.transfer(0x00);
uint8_t b3 = SPI.transfer(0x00);
// ビットを修正後、シリアルモニタへ出力
Serial.print(i); Serial.print("番地(H) = ");
Serial.println((b1 << 1) | (b2 >> 7));
Serial.print(i); Serial.print("番地(L) = ");
Serial.println(((b2 & 0b01111111) << 1) | (b3 >> 7));
digitalWrite(SS, LOW);
}
}
void loop() {
}
実行結果
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事

プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |








