
ラジコンカーを作成する(無線LAN/サーバー)
今回はスマートフォンで操作する事ができる「ラジコンカー」を作成しました。マイコンボードは2015年頃から流行したWifi対応の「ESP-WROOM-02」(¥650)を使用しています。
ラジコンカーの機能は「前進、後進、左旋回、右旋回」の4つです。
Arduinoのように使用できる「ESP-WROOM-02」が、はじめての方は先に次の関連記事をご覧ください。
ESP-WROOM-02にArduinoのスケッチを書き込む
データを送受信をするIoTデバイスの作り方
ESP-WROOM-02をWebサーバーにする
スマホでLEDを点灯させる (Webサーバー版)
データを送受信をするIoTデバイスの作り方
ESP-WROOM-02をWebサーバーにする
スマホでLEDを点灯させる (Webサーバー版)
モーターを操作するモータードライバーの扱い方は次の記事です。
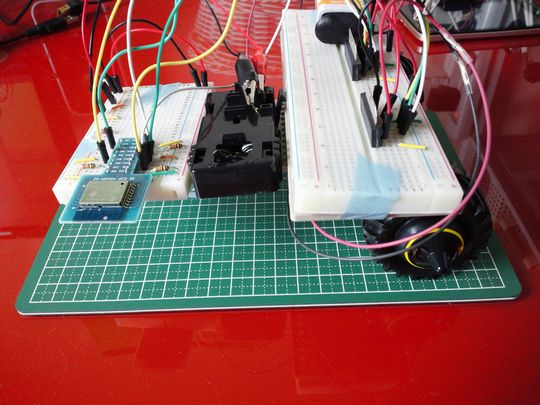
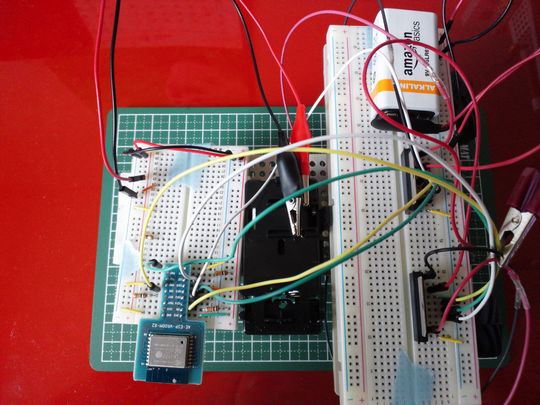
写真
[横]
[表]
[裏]
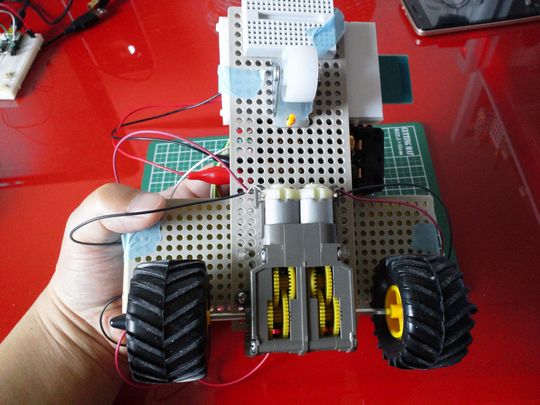
[後]

※裏にある白い「ミニブレッドボード」は未使用です。
試作品のブレッドボードですので配線やマスキングテープなどで粗雑です。また、1つのブレッドボードが無駄に長いのは、それしか余っていなかった為です。
システムの概要
ESP-WROOM-02のWebサーバーを起動して、スマートフォンでそのURLにアクセスします。スマホから直にマイコンボード(ESP-WROOM-02)にアクセスできますので、リアルタイムで操作を行う事が可能です。
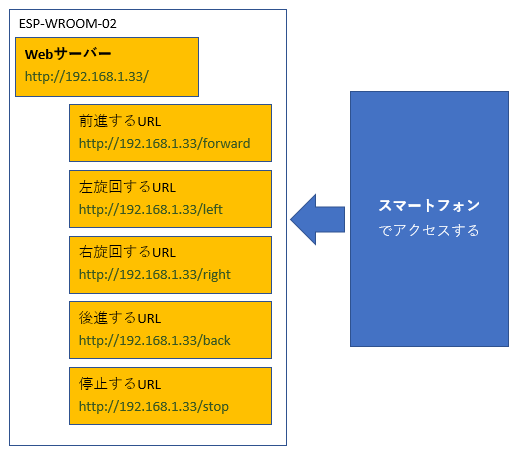
※IPアドレスは各自の環境に合わせてください。
※スマホの回線はWebサーバーと同じ環境にして下さい。
使用部品・材料
総額で約3000円です。(ESP-WROOM-02本体の値段を除く)
| 部品/材料 | 値段 | 備考 |
|---|---|---|
| ブレッドボード 2個 | ¥270 | 秋月電子の通販コード(P-00315) |
| モータードライバ(TA7291P) 2個セット | ¥150 | 秋月電子の通販コード(I-02001) |
| カーボン抵抗器 | 数円 | 10kΩ(3個)を使用 |
| 前輪用のキャスター | ¥100 | ホームセンターで白いキャスターを購入。 実際に試してはいませんが、秋月電子だとK-10372(300円)も検討すると良いかもです。 |
| タミヤ ユニバーサルプレート 2枚セット (70157) | ¥468 | |
| タミヤ ツインモーターギヤーボックス (70097) | ¥587 | 今回は低速ギヤー比203:1のCタイプのギアを使用しています。 |
| タミヤ マンモスダンプ 17013 | ¥819 | タイヤ2個と単3電池ボックスのみを使用しています。 [使用例] 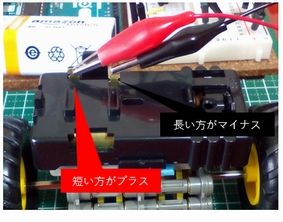 |
| 3mmプラネジ(7mm)+六角スペーサー(14mm)セット | ¥50 | 基盤やユニバーサルプレートの連結用。 秋月電子の通販コード(P-01861) |
| 9V電池 | ¥100 | モーターとモータードライバーの回路用 |
| 単3電池 2本 | ¥50 | ESP-WROOM-02用 |
| ジャンパーワイヤー付バッテリースナップ(縦型) | ¥40 | 9V電池用。 この商品のピンは太くて固いので通常のバッテリースナップでも良いかもです。 秋月電子の通販コード(P-09032) |
| コネクタ付コード(みの虫×ジャンパーワイヤ) | ¥110 | 単3電池ボックス用。 秋月電子の通販コード(C-08916) |
| マスキングテープ | 任意 | ブレッドボードなどを固定する為に、使用しています。青色の「ガラス、サッシ用」を好んで使用しています。 |
配線図
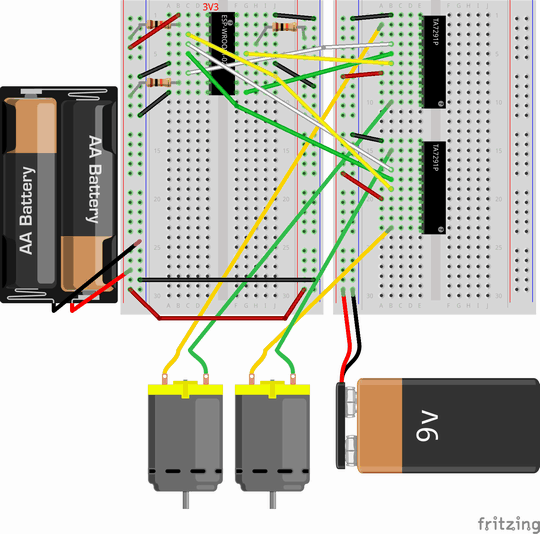
※大きい配線図はZIPで提供しています。
スケッチ(プログラム)
SSID、パスワード、IP情報は各自の環境に合わせてください。
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <ESP8266mDNS.h>
const char* ssid = "xxx";
const char* password = "xxx";
IPAddress ip(192, 168, 1, 33);
IPAddress gateway(192, 168, 1, 1);
IPAddress netmask(255, 255, 255, 0);
// 左
const int PIN_2 = 2; // IO2
const int PIN_4 = 4; // IO4
const int PIN_5 = 5; // IO5
// 右
const int PIN_12 = 12; // IO12
const int PIN_13 = 13; // IO13
const int PIN_14 = 14; // IO14
String html = "";
ESP8266WebServer server(80);
void setup(void){
pinMode(PIN_4,OUTPUT);
pinMode(PIN_5,OUTPUT);
pinMode(PIN_13,OUTPUT);
pinMode(PIN_14,OUTPUT);
// モーターの回転速度を最大にする
// ※analogWrite()はpinMode()で設定しなくて良い
analogWrite(PIN_2,255);
analogWrite(PIN_12,255);
html = "<!DOCTYPE html>\
<html>\
<head>\
<meta charset=\"UTF-8\">\
<meta name=\"viewport\" content=\"width=device-width,initial-scale=1,minimum-scale=1\">\
<style>\
table td{\
padding:15px;\
}\
</style>\
</head>\
<body>\
<br>\
<br>\
<br>\
<table>\
<tr><td></td><td><input type=\"button\" value=\"前進\" style=\"font-size:32px;\" onclick=\"location.href='/forward';\"></td><td></td></tr>\
<tr><td><input type=\"button\" value=\"左\" style=\"font-size:32px;\" onclick=\"location.href='/left';\"></td><td><input type=\"button\" value=\"停止\" style=\"font-size:32px;\" onclick=\"location.href='/stop';\"></td><td><input type=\"button\" value=\"右\" style=\"font-size:32px;\" onclick=\"location.href='/right';\"></td></tr>\
<tr><td></td><td><input type=\"button\" value=\"後進\" style=\"font-size:32px;\" onclick=\"location.href='/back';\"></td><td></td></tr>\
</table>\
</body>\
</html>";
Serial.begin(115200);
// WIFI_AP, WIFI_STA, WIFI_AP_STA or WIFI_OFF
WiFi.mode(WIFI_STA);
WiFi.config(ip, gateway,netmask);
WiFi.begin(ssid, password);
Serial.println("");
// Wifi接続ができるまで待機
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("IPアドレス: ");
Serial.println(WiFi.localIP());
// ローカルネットワーク内のみ有効のmDNS(マルチキャストDNS)を開始
// bool MDNSResponder::begin(const char* hostname){}
if (MDNS.begin("petitmonte")) {
Serial.println("mDNSレスポンダーの開始");
}
// トップページ
server.on("/", [](){
// HTTPステータスコード(200) リクエストの成功
server.send(200, "text/html", html);
});
// 前進
server.on("/forward", [](){
// 左タイヤ
digitalWrite(PIN_4,HIGH);
digitalWrite(PIN_5,LOW);
// 右タイヤ
digitalWrite(PIN_13,HIGH);
digitalWrite(PIN_14,LOW);
server.send(200, "text/html", html);
});
// 左旋回
server.on("/left", [](){
digitalWrite(PIN_4,LOW);
digitalWrite(PIN_5,LOW);
digitalWrite(PIN_13,HIGH);
digitalWrite(PIN_14,LOW);
server.send(200, "text/html", html);
});
// 右旋回
server.on("/right", [](){
digitalWrite(PIN_4,HIGH);
digitalWrite(PIN_5,LOW);
digitalWrite(PIN_13,LOW);
digitalWrite(PIN_14,LOW);
server.send(200, "text/html", html);
});
// 後進
server.on("/back", [](){
digitalWrite(PIN_4,LOW);
digitalWrite(PIN_5,HIGH);
digitalWrite(PIN_13,LOW);
digitalWrite(PIN_14,HIGH);
server.send(200, "text/html", html);
});
// 停止
server.on("/stop", [](){
digitalWrite(PIN_4,LOW);
digitalWrite(PIN_5,LOW);
digitalWrite(PIN_13,LOW);
digitalWrite(PIN_14,LOW);
server.send(200, "text/html", html);
});
server.begin();
Serial.println("Webサーバーの開始");
}
void loop(void){
// Webサーバの接続要求待ち
server.handleClient();
}
最後に
この「Webサーバー」によるリアルタイムでマイコンを制御する手法は、ロボットなど幅広く応用できると思います。
スポンサーリンク
掲示板
ArduinoやRaspberry Piなどの電子工作の掲示板を作成しました。質問やわからない事は電子工作 (Arduino・ラズパイ等)でユーザー同士で情報を共有して下さい。
関連記事
公開日:2017年04月19日 最終更新日:2017年08月20日

記事NO:02332
プチモンテ ※この記事を書いた人
 | |
| 💻 ITスキル・経験 サーバー構築からWebアプリケーション開発。IoTをはじめとする電子工作、ロボット、人工知能やスマホ/OSアプリまで分野問わず経験。 画像処理/音声処理/アニメーション、3Dゲーム、会計ソフト、PDF作成/編集、逆アセンブラ、EXE/DLLファイルの書き換えなどのアプリを公開。詳しくは自己紹介へ |
| 🎵 音楽制作 BGMは楽器(音源)さえあれば、何でも制作可能。歌モノは主にロック、バラード、ポップスを制作。歌詞は抒情詩、抒情的な楽曲が多い。楽曲制作は🔰2023年12月中旬 ~ | |








